Galvanometer Working

Description:
When the current flows in a coil placed in a magnetic field, it experiences a torque that is given by -
τ = NIAB sinθ
Where,
θ = angle between magnetic field ‘B’ and area vector ‘A’
By the equation of torque, we can observe that torque depends on current ‘I’ and angle ‘θ’, but for the proper working torque should only depend on current, so we need to make θ constant for this we have cylindrical magnetic heads in the galvanometer.
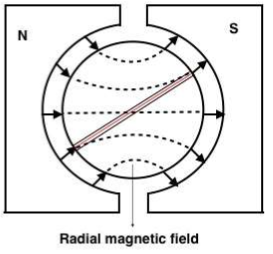
The cylindrical magnetic heads produce radial magnetic field and hence area vector ‘A’ is always normal to the magnetic field ‘B’.
∴ θ = 90o
∴ τ = NIAB
Hence, torque only depends on current.
As a current flow through the coil it rotates that results in rotation of spindle. when the spindle rotates the spring gets tightened up that generates a counter torque (storing torque).
Counter torque is given by
∴ τ = KΦ
Where,
K= torque per unit rotation
Φ = rotation
The counter torque keeps on increasing gradually and becomes equal to the torque applied by the coil
τcoil = τspring
NIAB = KΦ
∴ I α Φ
Observation: More the rotation more will be the electric current.
The current passing through the galvanometer is given by-
I = GΦ
G = K/NAB
Where,
G = galvanometer constant.
The current require to deflect meter by 1o is galvanometer constant.
Current sensitivity
Current sensitivity of a galvanometer is the measure of minimum value of current that can deflect the value of Φ in galvanometer, it is given by-
Is = Φ/I
Is = NAB/K
Observations
To increase the current sensitivity, we need to decrease the value of spring constant K, softer the spring lower will be the spring constant and higher will be the current sensitivity.
Larger the number of turns greater will be the current sensitivity.
Stronger the magnetic field greater will be the current sensitivity.
Larger the area greater will be the sensitivity.
Voltage sensitivity
Vs = Φ/V
Vs = Φ/RI
Vs = NAB/RK
Observations
To increase the voltage sensitivity, softer the spring lower will be the spring constant and higher will be the voltage sensitivity.
Thicker the wire lower will be the resistance and higher will be the voltage sensitivity.
Larger the number of turns greater will be the voltage sensitivity.
Stronger the magnetic field greater will be the voltage sensitivity.
Larger the area greater will be the sensitivity.